2016/11/13���É��E�\�����쌤����
����̃e�[�}�͓����̋B�͕͂\��ƏƂ炵���킹�Ď��K�B�\��̎��K�̑O�ɍ��i�̈ʒu�𐮂��Ă���]�ށB�����ɂƂ��Ċ�w�͊S�������珀���ɗ]

4������n�܂������É��E�\�����쌤�����2016�N�̍ŏI������B
���n�r���̖ڕW�ݒ�Ƃ��āA
�̑�܂��ɂQ�B
�\�����쌤����ł́A�A�{������ׂ���Ԃւ̉� �A�ɂ��ă��n�r���̎������߂����ƍl���Ă���B
����́A���s���e�[�}�ł�����^���w�̊�ɂȂ�u���s�v���A��U�����B
�^���w�́u���s�v�Ƃ����̂͋ɂ߂ĕ��G�ȃ��J�j�Y���𗝉����Ȃ���Ȃ�Ȃ��B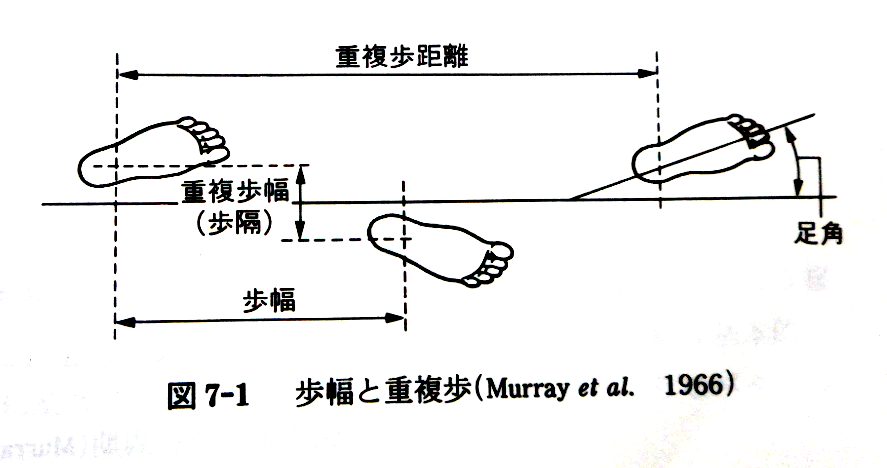
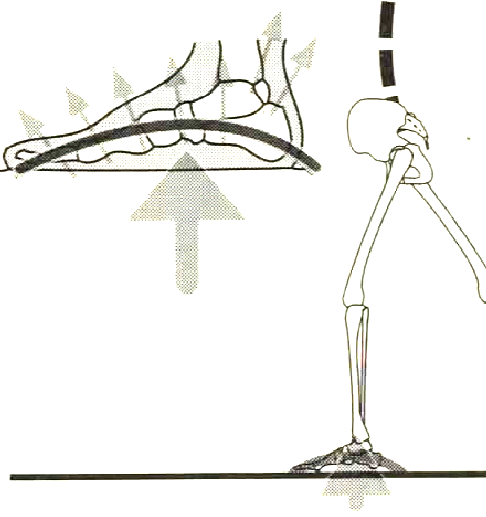
���s�����͗��r���ƗV�r���ɕ������A�e���͂������̊��ɕ�������B���r���͒n�ʂɒ����Ă��鑤�̋r�ŁA�u���ڒn-����ڒn-���r����-�����n-���w���n�v�̗v�f���琬��B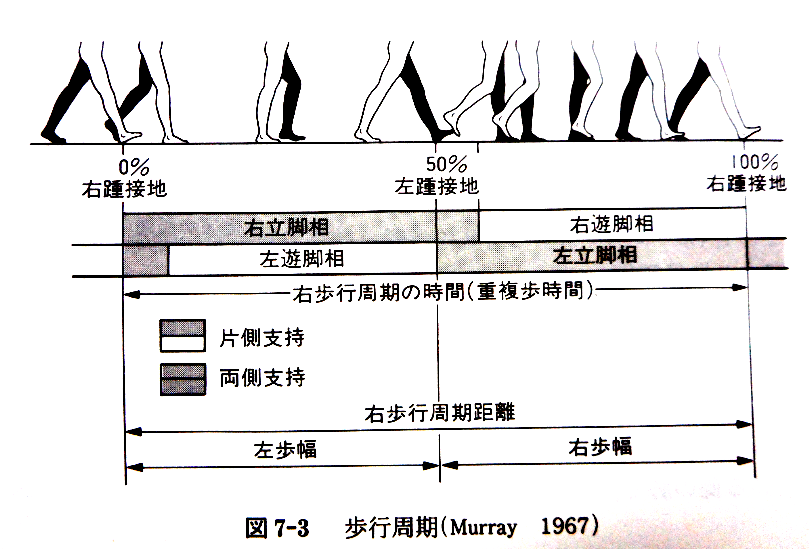
����b�^���w�i�㎕��o�Ŋ�����Ёj����������E�֓��G
�\�����쌤����ł́A�̂̐^���ɑ���ڒn������s�𐄏����Ă���B�㔼�g���^�������ֈړ����āA������r���x������A�Ƃ����A�������s�Ƃ������ƂɂȂ�B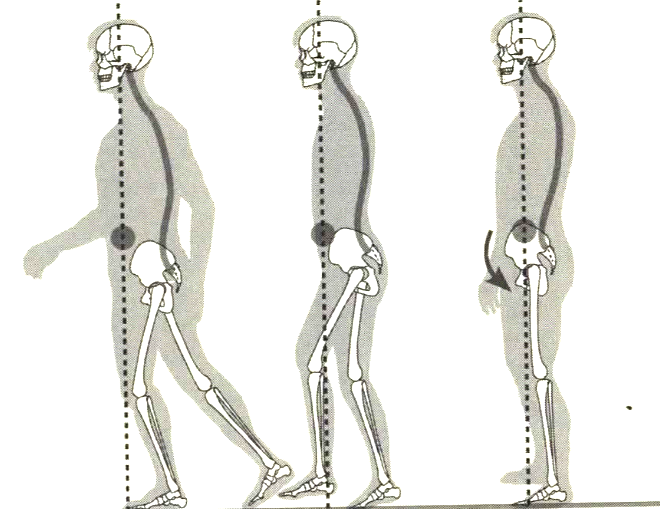
���䂩��J���_���ς��i���f�o�ŎЁj�@�������l�G
�̂̐^���ɑ���ڒn����̂́A�Ռ��ɂȂ鈳�����_�C���N�g�ɕ��U���邽�߁B�^���w�́u���ڒn-����ڒn-���r����-�����n-���w���n�v�Ƃ������s���f���ł́A�Ռ����傫�������U�ł��Ȃ��B
���䂩��J���_���ς��i���f�o�ŎЁj�@�������l�G
�̂̐^���ɑ���ڒn���邱�ƂŏՌ����ɘa����ƂƂ��ɒn�ʂ���͂��₷�����Ƃ����_�ɂȂ�B���s�ɂ����ďd�S�ړ����~���ɍs�����Ƃ́A���K�ȓ�����l�������ŏd�v�ł���B
�������A�^���w�̕��s���f������̂̐^���ɑ���ڒn������s�ɐ�ւ��邽�߂ɂ͕��s�P�������ł͓���B����́A�̂̐^���ɑ���ڒn���邽�߂̉������̎x�����̊l���ƒn�ʂ̏����j�^�����O���邽�߂̐[�����o�i�ŗL���o�j��q���ɂ��Ȃ���Ȃ�Ȃ�����ł���B
�����̏������N���A���āA�㔼�g���擱������s�̎��R������҂B�㔼�g���擱������s���o���킩��悤�ɂȂ�����A����ڒn���ɂ��Ă����B
�܂��A���Ȃ�������Ȃ����Ƃ͎l�����ʂ��o���邱�ƁB���ʍ��ŕ��A�卜���̉^�����R�x�������ǂ����Ƃ��œ�ցB�l�����̎x�������ő���Ɋ��p���p���ێ��̂��߂̋ؓ��̒��߂��ŏ����ɂ��邱�Ƃ��|�C���g�B
�Â��ẮA���Ⴊ�ޓ���ɂ�����d�S�ړ����~���ɂ���B����܂łɓ������Ă��Ȃ��������߂̉������J�ɒT�蓮���������Ă����B�X�N���b�g�́A�r�ŏd�S���R���g���[�����Ďx�����ʓ��̏d�S�������S�߂����ێ�����B

���Ⴊ�ޓ���́A�Ռ����ɘa���邽�߂̋r���l�����邽�߂ɂ���Ȋ�{����ł���B���䂪�����l�Ƃ����̂́A�t���E�X�N���b�g�����ȌX���ɂ���B
������q�_�̒����劈�����I
�t����S�X��ɓn���č\�����쌤�����i�߂Ă��ĕ��K���Ă݂邱�ƂŐV���ɔ������邱�Ƃ����������B�[�����o�i�ŗL���o�j�����������邽�߂̃��n�r���Ƃ����̂��A�v������������Ȃ��A���g��ł����Ë@�ւ����Ȃ��̂ŁA���������Ɍ�����i�߂Ă��������Ǝv���܂��B���N�̍\�����쌤����̏ڍׂɂ��܂��ẮA�e�[�}��ۑ���������A�搶���Ɠ������������ƍl���Ă��܂��B����Ƃ���낵�����肢�v���܂��B
�@�c�C�[�g